




Ученые из Технологического университета Эйндховена научили нейроморфного робота экономно и быстро находить путь выхода из лабиринта. Такой сообразительностью обладает только мозг человека.
Лабиринт популярен у психологов для оценки способности грызунов к обучению. Исследователи из Технологического университета Эйндховена (Нидерланды) и Института исследований полимеров Макса Планка в Майнце (Германия) доказали, что роботы с логической системой, подобной человеческому мозгу, способнее крыс и мышей и могут сами выбраться из лабиринта. Результаты работы команды ученых опубликованы в журнале Science Advances.
Машинное обучение и нейронные сети в последние годы вошли в моду, и это вполне понятно, учитывая их успехи в распознавании изображений, медицинской диагностике, электронной коммерции и многих других областях. Однако существенным недостатком этих методов является масштабное энергопотребление компьютеров, которые занимаются такими расчетами. Поэтому многие исследователи пытаются для решения аналитических задач имитировать работу человеческого мозга – природного компьютера, не имеющего себе равных по низкому энергопотреблению.
Нейроны человеческого мозга взаимодействуют друг с другом посредством синапсов – мест контакта нейронов, передающих нервные импульсы путем электрического или химического взаимодействия. Активность синапсов (возбуждение или торможение сигнала нейронов) усиливается, когда через них проходит информация. Синаптическую модель передачи информации как раз и использовали авторы исследования способности роботов проходить лабиринт.
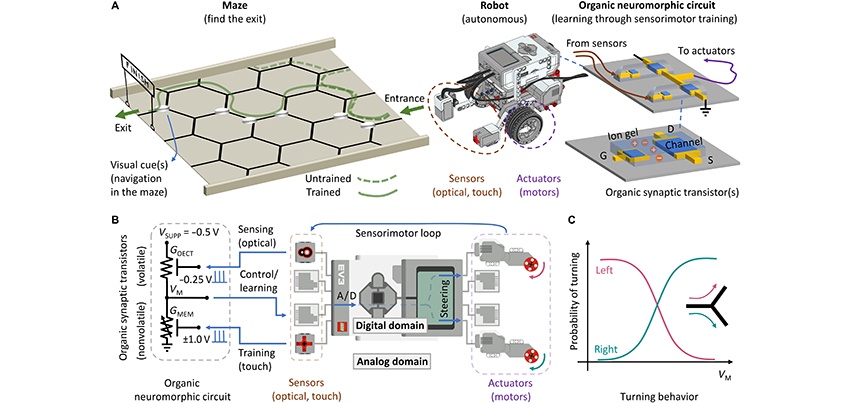 Схема эксперимента. Изображение Science Advances.
Схема эксперимента. Изображение Science Advances.
Для экспериментов ученые использовали знакомого многим школьникам робота из конструктора Lego Mindstorms EV3. Робот воспринимал окружающую среду с помощью оптических и механических сигналов от датчиков отражения и касания, перемещаясь в лабиринте с помощью левого и правого сервомоторов. Лабиринт был нарисован линией черного цвета и представлял собой соты из шестиугольников.
Движение робота контролировала нейроморфная схема, составленная из двух синаптических транзисторов – энергонезависимого и летучего органического синаптического транзистора MEM (память) и OECT (органический электрохимический транзистор). Транзисторы были соединены последовательно и образовали обучаемый делитель напряжения. Выходное напряжение зависело от соотношения сопротивлений между двумя синаптическими транзисторами, а также от входных сигналов с датчиков отражения и касания.
Синаптические транзисторы уровнем электрического напряжения поощряли или наказывали робота за правильное или неправильное движение. Так формировалась сообразительность устройства и правильная линия поведения при выборе пути выхода из лабиринта.
Авторы исследования надеются, что сочетание органической нейроморфной электроники с робототехникой образовательного назначения приведет к созданию универсальной платформы для физического моделирования и быстрого прототипирования интеллектуальных систем реального мира.